Mass simulation in VR using vibrotactile feedback and a co-located physically-based virtual hand
Abstract
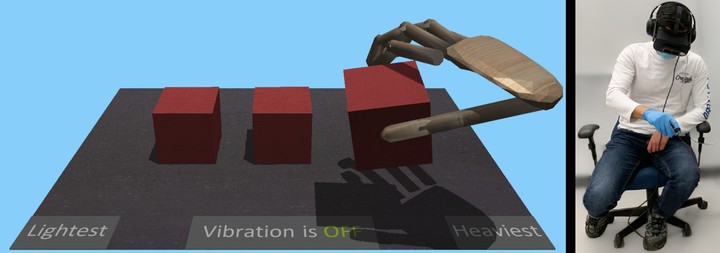
Virtual reality allows for highly immersive simulated experiences and interaction with virtual objects. However, virtual objects do not have real masses. Providing the sense of mass for virtual objects using un-grounded haptic interfaces has proven to be a complicated task in virtual reality. This paper proposes using a physically-based virtual hand with improved co-location and a complementary vibrotactile effect on the index fingertip to give the sensation of mass to objects in virtual reality. The vibrotactile feedback is proportional to the balanced forces acting on the virtual object and is modulated based on the object’s velocity. For evaluating this method, we set an experiment in a virtual environment where participants wear a VR headset and attempt to pick up and move different virtual objects using a virtual physically-based hand while a voice-coil actuator attached to their index fingertip provides the vibrotactile feedback. Our experiments indicate that the virtual hand and our vibration effect give the ability to discriminate and perceive the mass of virtual objects.
Hooman Khosravi
Alumni M.Sc. Student
September 2017 - August 2021
Hooman was an MSc student interested in immersive simulation, Co-Supervised, Supervisor: Sonny Chan.