Balancing Rotation Minimizing Frames with Additional Objectives
Abstract
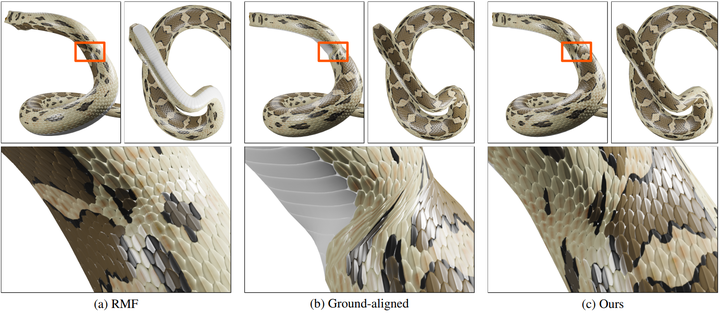
When moving along 3D curves, one may require local coordinate frames for visited points, such as for animating virtual cameras, controlling robotic motion, or constructing sweep surfaces. Often, consecutive coordinate frames should be similar, avoiding sharp twists. Previous work achieved this goal by using various methods to approximate rotation minimizing frames (RMFs) with respect to a curve's tangent. In this work, we use Householder transformations to construct preliminary tangent-aligned coordinate frames and then optimize these initial frames under the constraint that they remain tangent-aligned. This optimization minimizes the weighted sum of squared distances between selected vectors within the new frames and fixed vectors outside them (such as the axes of previous frames). By selecting different vectors for this objective function, we reproduce existing RMF approximation methods and modify them to consider additional objectives beyond rotation minimization. We also provide some example computer graphics use cases for this new frame tracking.
Christopher Mossman
M.Sc. Student
September 2020 - present
Christopher is an MSc student whose research focuses on applying Augmented Reality to 3D printed objects.